عندما نفكر في الروبوتات فإننا نتخيل عادةً آلة ثلاثية الأبعاد تتلاعب بالبيئة المحيطة بها، غير أن باحثي جامعة يال قرَّروا سلوك طريق مختلف، وذلك بالابتعاد عن المألوف وتصميم "بشرة روبوتية" تلتف حول أجسام أخرى وتتلاعب بها من الخارج، وهو حل غريب صُمِّم للمساعدة في حل بعض المشاكل الخاصة بعصر الفضاء، على الرغم من أن مخترعيه يأملون في أن يجدوا بعض التطبيقات له على الأرض أيضاً.
يقول مؤلف الدراسة جورا بوث: "إنه روبوت مسطح يحتوي على عضلات اصطناعية ومستشعرات تحدِّد مدى تقلُّص هذه العضلات، وهو يمكِّننا من التحكم في الأشياء التي يلتف حولها".
ويمكن -مبدئياً- أن نستخدم أي جسم ليِّن وتحويله إلى روبوت عند تغليفه بهذه البشرة، مثل قطعة من أنبوب رغوي أو كرة أو حتى دُمية محشوة، كما يظهر في هذا المقطع المرئي الذي نشرته جامعة يال.
ويمكن لهذه الروبوتات أن تُستخدم في الكثير من الأشياء المختلفة اعتماداً على ماهية الجسم المستخدم وكيفية وضع البشرة عليه.
وفي بيئة مثل الفضاء -حيث لا يستطيع رواد الفضاء حمل الكثير، ولكنهم قد يضطرون إلى تأدية مهام غير متوقعة- يمكن لهذه الروبوتات التي لا تستهلك الكثير من الحجم أن تُثبِت قيمتها بالمساعدة على تكييف الأشياء الموجودة. وقد تم تصميم هذه الروبوتات في مختبر ريبيكا كريمر بوتيجليو للروبوتات الليِّنة، والمعروف أيضاً باسم مختبر التصنيع (اختصاراً: فابراتوري)، مع مراعاة استخدامها خارج الكرة الأرضية.
وبعد أن طلبت ناسا بناء روبوتات للاستخدام الفضائي، كتب بوث وكريمر بوتيجليو رسالة بالبريد الإلكتروني إلى بوبساي؛ فقد كانت كريمر بوتيجليو تفكر في "بعض القيود التي تُعيق إرسال الروبوتات إلى الفضاء، خصوصاً التكلفة العالية لنقل وحدة الحجم والكتلة، وقد توصَّلت إلى الفكرة التالية: ماذا لو حاولنا -بالإضافة إلى تخفيض وزن الروبوتات المستخدمة للتطبيقات الفضائية وحجمها- أن نُخفِض عددها أيضاً؟".
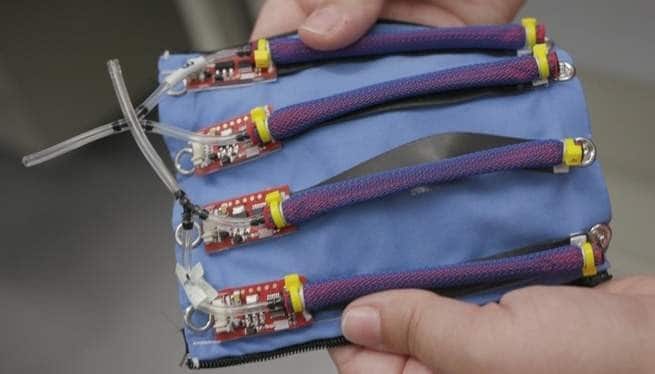
وتبيَّن أن كيفية عمل جميع أجزاء الروبوت بشكلٍ منسق وجماعي -أي العضلات الاصطناعية والغلاف والمستشعرات التي تتحكم في علاقة الأجزاء مع بعضها البعض- مسألة صعبة بشكل غير متوقع، وقد واجه الفريق الكثير من المتاعب حتى تمكَّن من مساعدة المستشعرات على فهم طول العضلات الاصطناعية، وتنسيق عمل النظام. وقد عرض الفريق ضمن البحث بعض الأشكال المختلفة للبشرة والعضلات التي تمكَّنوا من التحكم في حركتها.
ولكن بوث يقول: "سيكون هناك الكثير من أنواع البشرات الروبوتية" في المستقبل.
ومن الأمثلة المذكورة في البحث: بشرة على شكل مستطيلين، وبشرة تُستخدم كمقياس مرونة مع مشغلات ميكانيكية هوائية (أي عضلات)، وبشرة نسيجية مع مشغِّلات ميكانيكية من خلائط معدنية، ومثلث نسيجي مع مشغلات ميكانيكية على الحواف. ويقول بوث إنه يوجد مجال كبير للحصول على المزيد من النماذج عن طريق جمع هذه المكونات ومطابقتها، ويمكن أن تستخدم هذه الروبوتات المسطحة لعدة أشياء؛ بدءاً من قميص يقوم بتصحيح الوقفة (كما في الصورة المتحركة في الأعلى) والذي ذُكر في البحث، ووصولاً إلى مقبض متعدد الاستخدامات لحمل الأشياء.
وقد كتبت كريمر بوتيجليو: "فكرتنا بسيطة، ولكن من المثير للاهتمام أننا لم نجد شيئاً مماثلاً في الأدبيات العلمية، ونعتقد أن هذا يعود إلى أن هذه الفكرة غير مستوحاة تماماً من الكائنات العضوية؛ حيث إننا لم نعثر على أية أمثلة حول متعضيات ذات جسم خامد وبشرة فعالة. ويمكن لنا عند بناء هذه الأنظمة الاصطناعية أن نحصل على زيادة كبيرة في المساحات المتاحة للتصميم بفضل هذه الفكرة".
بقيت أمامنا مسألة واحدة؛ أي اسم يمكن أن نُطلقه على روبوت مسطَّح؟ فطيرة محلاة مثلاً؟