أتعرف هذا الصوت الخافت في رأسك، والذي يهمس لك قائلاً: "قد يكون القفز من هذا الجرف الصخري فكرة سيئة" أو "لا يمكنك أن تشرب جالوناً كاملاً من الحليب"؟
هذه الدمدمة هي الشك بالنفس، وهو يحافظ على حياتنا. غير أن الروبوتات لا تمتلك هذه الغريزة. ولكن حتى تستطيع الروبوتات والطائرات بدون طيار أن تعمل في العالم الحقيقي، يجب أن تكون قادرة على إدراك حدود قدراتها. لا يمكننا أن نتساهل مع وجود روبوت يتخبط في الظلام أو يحاول اختراق الجدران. وفي ورقة بحثية جديدة، يحاول الباحثون في كارنيجي ميلون أن يزودوا الروبوتات بإمكانية التأمل الذاتي، أو الشك بالنفس. ويمكن للروبوتات أن تصبح أكثر حذراً وأماناً عن طريق توقع نتائج فشلها، وذلك عبر الذكاء الاصطناعي.
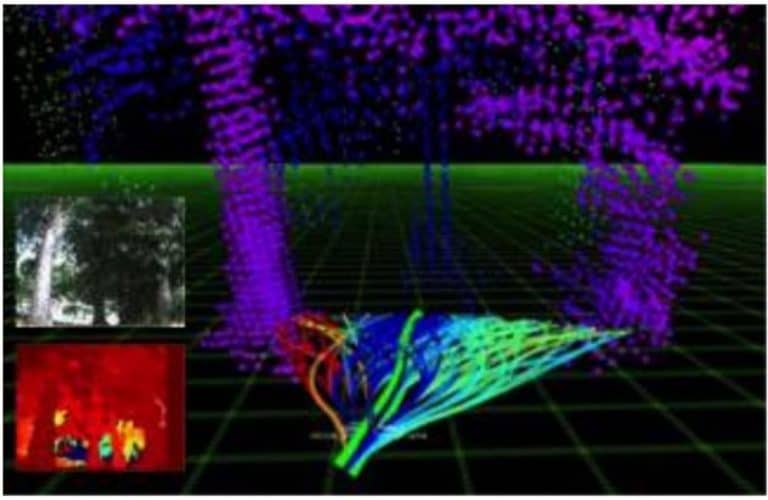
يمكن للروبوتات قياس إمكانية النجاح والفشل في عملها عن طريق التوقع. حيث أننا كبشر نتوقع النتائج بشكل طبيعي، عن طريق تخيل جميع المشاكل التي يمكن أن تقع بعد اتخاذ قرار ما. وفي حالة اتخاذ قرار حول مسار طائرة بدون طيار، يمكن لخوارزمية أن تتفحص تسجيل الفيديو من الكاميرا في الطائرة، وتتوقع بناء على الأجسام في الصورة ما إذا كان القرار التالي سيتسبب بتحطم الطائرة. أي أنه يجب على هذه الطائرة بدون طيار أن تتخيل المستقبل.
تتجاوز هذه الفكرة مسائل اكتشاف الأجسام، وهي ميزة موجودة حالياً في بعض الطائرات بدون طيار. ومبدأ العمل بسيط جداً: إذا كان هناك شيء ما يعترض طريقك، لا تذهب إلى هناك. ولكن إطار العمل هذا يسمح للذكاء الاصطناعي بأن يحدد فعلياً ما إذا كانت عاقبة هذا السيناريو وخيمة بالنسبة لهدفه الأساسي. وهذا يتضمن ظروف الطقس التي قد تمنع حساسات الطائرة من العمل، أو نقص الإضاءة الضرورية للكاميرات. أي أن الأمر لا يتعلق بمواجهة الخطر بل بتوقع حدوثه.
يجب على الطائرة بدون طيار أن تتخيل المستقبل
قام الباحثون في اختبارات كارنيجي ميلون بتعديل طائرة بدون طيار وإطلاقها للتحليق بشكل ذاتي بين الأشجار في غابة. وباستخدام التأمل الذاتي، تمكنت الطائرة من التحليق لمسافة تزيد على ضعف المسافة في المحاولات التي أجريت بدون التأمل الذاتي، حيث كانت تناور بين العوائق لمسافة أكثر من 1000 متر، وذلك بتوقع مسار الطائرة واحتمال تحطمها إذا اتبعت هذا المسار.
غير أن هذا العمل ما يزال في مراحله الأولى، كما أنه ليس الوحيد من نوعه. فقد كان إيريك هورفيتز من مايكروسوفت يعمل على هذه الفكرة منذ سنوات، وقد ركز على محاولة الجمع والعمل المشترك بين الكثير من خوارزميات اتخاذ القرار.
يقول هورفيتز: "نحن نعمل على تطوير أنظمة فاعلة قادرة على معالجة الكثير من الأشياء في نفس الوقت، وتستطيع أن تفكر معاً وتنسق ما بين وظائفها وتضارباتها بشكل انسيابي، وذلك حتى تعمل بشكل أقرب ما يمكن لفرقة أوركسترا مدربة".
اعتمدت إحدى هذه السيناريوهات على برنامج ألعاب، ولكن بين ذكاء اصطناعي يلعب دور المضيف ومتسابقين بشريين. يطرح الذكاء الاصطناعي سؤالاً، ويجيب البشر. ولكن للمحافظة على انسيابية الحوار، مثل سؤال أحد المتسابقين ما إذا كان بحاجة للمزيد من الوقت، يقوم الذكاء الاصطناعي بحساب الفترة اللازمة له لتشكيل الجواب، ومقارنة النتيجة مع الزمن المتوقع مروره قبل أن يتكلم المتسابق البشري. فإذا كان زمن الذكاء الاصطناعي أكبر، يبقى صامتاً. يقول هورفيتز: "إن إضافة هذه الطبقة البرمجية كان أمراً جميلاً، وقد جعل من النظام أكثر سلاسة".
إذا كان بالإمكان تزويد الروبوتات بالوعي الذاتي، فسوف يكون هذا عن طريق تعليمها التأمل الذاتي. وهو يقوم على زرع التزام بدائي بالبقاء فيها، وهي فكرة قد لا تعجب بعض مستشرفي المستقبل. ولكن على الأقل، لا يمكن لهذه الروبوتات حالياً أن تفعل أكثر من أن تناور لتتفادى بالكاد الاصطدام بالأشجار، وسيبقى البشر بأمان لبضع سنوات إضافية أو أكثر.