تستخدم معظم الكائنات الحية أنظمة عضلية "لينة" للتحرك. على سبيل المثال، لا تحتاج الأخابط والعناكب إلى محركاتٍ ثقيلة أو ما يشبه علب التروس لتدوير أجسادها والسير من مكان إلى آخر.
يقول جوناثان روسيتر، أستاذ الروبوتات في جامعة بريستول في المملكة المتحدة: «سواء كانت الحيوانات تمتلك هياكل خارجية، كالحشرات، أو هيكل داخلي مثلنا، فالمكونات الداخلية لدينا لينة. ومع ذلك، تعتمد معظم الروبوتات الحالية على المحركات والتروس وأنظمة النقل المعقدة، ما يزيد وزنها وحجمها. إذا أمكننا صنع روبوتٍ يمتلك آليات تحرك لينة في المستقبل، أو على الأقل، الاستفادة من بعض هذه الخصائص اللينة، يمكن جعلها أصغر حجماً وأبسط وأكثر ملائمةً للبيئة».
عادةً ما يكون للروبوتات الصغيرة الطائرة اتصال غير مباشر بين نظام الدفع والأجنحة، مقسّمٍ إلى مكونات مثل المحرك والتروس والأشرطة المطاطية ونوعٍ من آلية الرفع. لكن هذه ليست الطريقة التي تعمل بها الأجنحة في الحشرات والطيور.
ويضيف روسيتر: «إذا أخذنا النحل على سبيل المثال، فإن أجنحتها تطورت بحيث يكون هناك اقترانٌ مباشر إلى حد ما بين العضلات والأجنحة التي تحركها، أي لا يوجد هناك أي وسيط لنقل الحركة بينهما. ترتبط العضلات داخل أجسام الحشرات عموماً بأطراف أجنحتها، وبذلك يمكنها خفقها مراراً وتكراراً بسرعة وكفاءة مذهلتين».
اقرأ أيضاً: هل تعتقد أن البشر اجتماعيون لدرجة مصادقة الروبوتات؟
لازا: نظام طيران جديد مبتكر
ولذلك ابتكر الباحثون نظام طيرانٍ جديد أطلقوا عليه اسم «لازا» (LAZA)، والذي يمثل اختصاراً للأحرف الأولى لعبارة «محفزات تضخيم السوائل» (liquid-amplified zipping actuators)، حيث يمكن ربط هذا النظام مباشرة بآلية الطيران.
النظام من تصميم المهندس «تيم هيلبس»، وهو جزءٌ من بحثه في جامعة بريستول. يقول هيلبس: «جوهر المشروع هو نوع جديد من العضلات الاصطناعية التي يمكنها تحريك أجنحة الروبوت. أنا شخص أتحرك بواسطة عضلاتي، وأحب ابتكار شيء جديد يمكنه أن يتحرك بآلية مشابهة بواسطة عضلات اصطناعية. أكثر ما أفخر به هو أنني طورت عضلاتٍ تستطيع إنتاج طاقةٍ أكبر مقارنةً بالطاقة التي تمنحها عضلات الحشرات أو الحيوان الثدي لنفس الوزن».
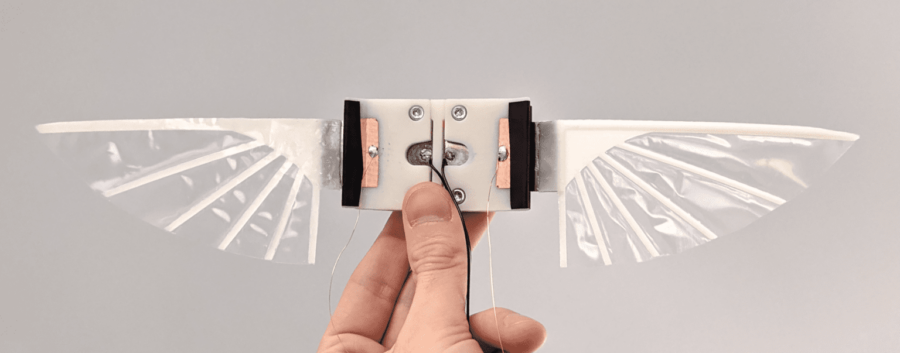
يُستخدم نظام «لازا» حالياً لتشغيل مجموعة من الأجنحة المكسوة بألواح بلاستيكية. النموذج الأولي، والذي ظهر في تقريرٍ في دورية «ساينس روبوتيكس» مؤخراً، يشبه طائر الواشي الذهبي الصغير الذي ظهر في هاري بوتر. إنه ليس مستقلاً كلياً ولا يمكن القول عنه إنه روبوت تماماً. في الوقت الحالي، ما يزال تصميم الروبوت بلا "دماغ"، و«العضلات» مثبتةٌ في إطارٍ مستطيل الشكل مؤقت ومدعومٍ قليلاً بأسلاك رفيعة (الصورة أدناه).

يقول روستير: «ما لدينا هو أجنحة تطير عبر المختبر. والأجنحة بحد ذاتها لا تشبه أجنحة الحيوانات أو الروبوتات الأخرى، لذلك فهي مدعومة بأسلاكٍ لتوجيهها بحيث تمنعه من السقوط على الأرض ببساطة».
اقرأ أيضاً:لأول مرة: بناء روبوتات من خلايا الضفادع قادرة على التكاثر الذاتي
كيف تعمل هذه الأجنحة؟
يمكن لهذه الأجنحة، في التجارب المخبرية، توليد قوة دفعٍ للأمام تصل إلى 5.73 ميلي نيوتن من خلال تزويدها بـ 243 ميلي واط من الطاقة الكهربائية، لتطير بسرعةٍ تصل إلى 0.71 متراً في الثانية.
وتستمد طاقتها من الكهرباء الساكنة بدلاً عن الطاقة الكهرومغناطيسية (والتي تستخدم تياراً عالياً لتوليد مجال مغناطيسي)، وتستند إلى الأبحاث السابقة التي أجراها هليبس وروستير على روبوتات الأوريغامي الكهربائية.
تعتمد الأنظمة الكهروستاتيكية على جذب الشحنات المعاكسة وخاصية فيزيائية تسمى قوى كولوم لتوليد الحركة. تُوضع مادة الجناح بين لوحين من الأقطاب الكهربائية ويلتقيان عند المفصّلة (نقطة التقاء الجناح بجسم الروبوت). وهكذا، ومن خلال شحن وتفريغ الأقطاب الكهربائية، يمكن للجناح أن يخفق لأعلى ولأسفل بين الجانبين (الصورة أدناه).

يقول روسيتر: «أحد الأسباب التي تجعل نظام لازا يعمل بكفاءةٍ أفضل من المحركات الكهروستاتيكية السابقة هو وجود كمية قليلة من الزيت في نقطة توليد الحركة، حيث يتم توليد قوة عالية. يزيد هذا الزيت القوى وكثافة المجال الكهربائي نظراً لأنه عازل كهربائي جيد، ويتيح للنظام إتمام مليون دورة من خفق الأجنحة دون أن يؤدي ذلك لانخفاض أدائه».
يعتقد الفريق، بالنظر إلى إمكانية تعديل سرعة خفق الأجنحة والمسافة التي يمكن أن تخفق بها، أن هذا النوع من مولدات الحركة يمكن أن يوجه نفسه في الهواء بشكلٍ أفضل مقارنةً مع نظام المحرك التقليدي.
لم يتم الانتهاء من تصميم أدوات التحكم في نظام المحرك الجديد بعد، ولا يحمل النموذج الأولي للروبوت مصدراً مستقلاً للطاقة على متنه حتى الآن. يقول روسيتر: «نظام الدفع موجود على متن النموذج، لكن باقي أجزاء الروبوت غير موجودة. ما سنقوم به هو تركيب هذه الأجنحة على هيكلٍ متطور أكثر بعض الشي ومن ثم تجربتها خارج المختبر».

حجم الروبوت يلعب دوراً في العملية
لكن عليهم أولاً تقرير حجم الروبوت الذي يريدون صنعه، إذ سيؤثر ذلك على تصميم الأجنحة وجسم الروبوت. لقد تم تصميم الجناح الحالي، والذي يبلغ طوله 150 ميللمتراً، على غرار أجنحة اليراع، والتي تلتوي وتتأرجح أثناء خفقانها للأعلى والأسفل.
اعتماداً على طاقة الكهرباء الساكنة، إذا تم تقليل حجم النظام، فسينتج طاقةً أكبر نسبياً وسيكون قادراً بالتالي على رفع أوزانٍ أكبر، ولكن قد تكون هناك صعوبة في تصغير حجم بعض الأجزاء في الواقع.
يقول روستير في هذا الصدد: «إذا تمكنا من تقليل الحجم، فسيكون الروبوت أكثر شبهاً بالحشرات لأنه سيمتلك جسماً خاصاً بتوازنات محددة ومركز كتلة يتناسب معها بشكلٍ جيد. أما إذا لم نتمكن من تقليل حجم الروبوت، فمن المرجّح أن يكون تصميمه أشبه بطائرٍ صغير».