لا يخفى على أحد بأننا لا نقوم دائماً بتنظيف مخلفاتنا بعد سفرنا إلى الفضاء. حيث يتراكم الحطام الفضائي – مثل الأقمار الصناعية التالفة، وحاويات وقود الصواريخ الفارغة، والشظايا الناجمة عن الاصطدامات السابقة مثل حادث تحطم القمر الصناعي الروسي عام 2009 – تدريجياً في مدار الأرض. ويسبب هذا الركام الخارجي مشاكل حقيقية لرواد الفضاء الحاليين، حيث تستلزم البعثات الجديدة حسابات دقيقة لتتبع العوائق وتجنبها. وتقوم محطة الفضاء الدولية بإجراء تعديلات عدة مرات في السنة لتفادي الاصطدامات الكارثية مع هذه الخردة الفضائية.
ولكن لا أحد يعرف كيفية سحب هذه النفايات والتخلص منها. إذ يمكن الإمساك ببعض الحطام إذا كان له مقبض، ولكن الكثير من هذه القمامة مؤلفة من سطوح ملساء بدون نقاط للوصول إليها. ولهذا السبب قال مارك من جامعة ستانفورد في بث مباشر عبر الفيسبوك يوم الأربعاء: "إنها مشكلة بدون حل". ولكن كشف كتكوسكي وزملاؤه في دراسة نشرت هذا الأسبوع في مجلة سيانس روبوتيكس " Science Robotics" عن نوع جديد من القابضات المصمّمة خصيصاً للإمساك بالبقايا الكبيرة والأكثر خطورة.
وخلافاً لغيرها من القابضات التي تعتمد على مضخات الهواء المضغوط أو على المواد اللاصقة كالشريط اللاصق، يعتمد هذا القابض على بلاطات مستوحاة من قدم حيوان البرص. إذ يحتوي على أوتاد صغيرة كالشعر والتي تبلغ ثخانتها خمسة عشر ميكروناً (أي أصغر بعشرة أضعاف من شعر الرأس)، وتنحني عند الضغط بشكل توجيهي لتلتصق عبر قوى فان دير فالس. وتوضع المادة على شكل بلاطات مزدوجة، وتنشط عن طريق سحبهما معاً بواسطة شريط مشترك، ويتم تحريرها عندما تصبح عمودية. وبهذه الطريقة يمكن تشغيل وإيقاف اللاصق بسهولة (مما يجعلها قابلة لإعادة الاستخدام)، وهي لطيفة على الأسطح مثل الألواح الشمسية ونوافذ السفن الفضائية.
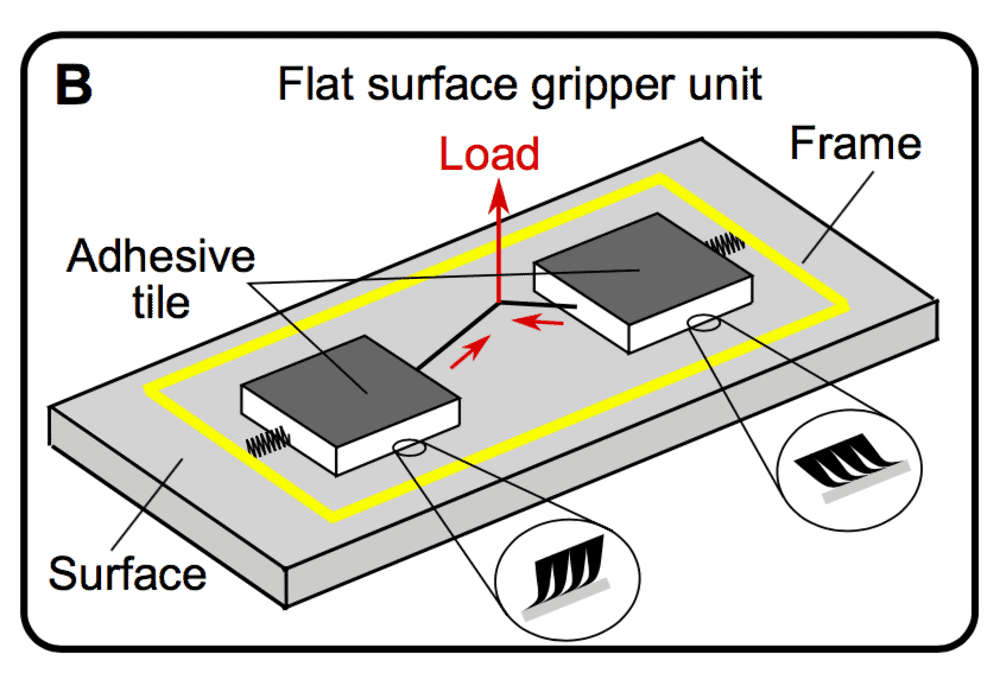
إن بلاطتي المادة اللتين تحتويان على أوتاد صغيرة باتجاهات متعاكسة يتم سحبهما معاً لإحداث الالتصاق.
حقوق الصورة: ساينس روبوتس
بعد ذلك يتم ربط البلاطات المزدوجة مع بعضهما بنظام بكرات لتوزيع التوتر بالتساوي. وهذا يجعل القابض أكثر قوة، لأن القبضة المستندة على السطح عرضة للعيوب في السطح (مثل الثقوب الناجمة عن البقايا الصغيرة أو تقشير الطلاء نتيجة أضرار أشعة الشمس). وإذا كان الاختلاف يسبب فقدان التوتر في إحدى الوسادات، فسوف تكون الوسادات المتبقية قادرة على التعويض بأمان. كما يسمح نظام تقاسم الحمولة بتخصيص حجم هذه المقابض لأغراض مختلفة، بدءاً من الوسادات التي تشبه القدم على الروبوت المتسلق، إلى مثبّت رسو السفن في مكوك الفضاء.
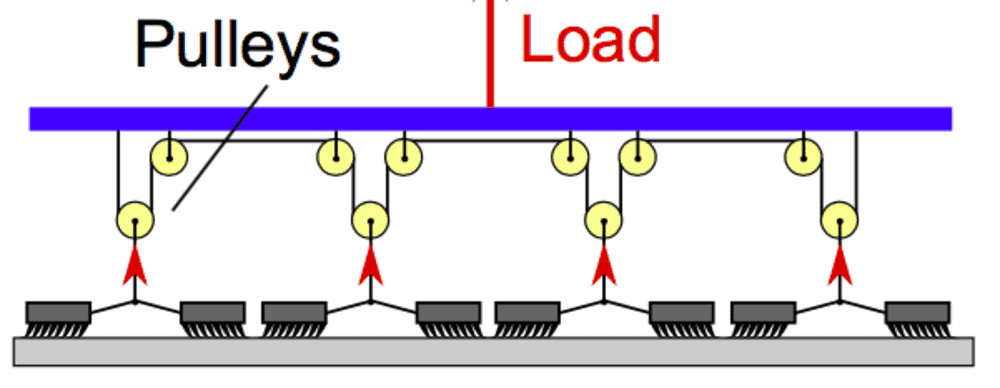
توضح الصورة كيف يمكن ربط البلاطات المختلفة معاً للإمساك بالأشياء بشكل أقوى، مما يجعل نظام القابض قابلاً للتطوير إلى أي حجم.
حقوق الصورة: ساينس روبوتس
وبالإضافة إلى كونها قابلة لإعادة الاستخدام وتغيير الحجم، فإن هذه القابضات تعتبر فريدة من نوعها في قدرتها على الإمساك والإفلات دون حركة إضافية. إذ يتم تنشيط القابض بواسطة مستشعر اللمس، ويمسك بالأشياء بشكل تلقائي عند اتصاله معها. ويستطيع رائد الفضاء التخلي عن أحد الأشياء بواسطة زر إفلات، وينفصل القابض عنها بشكل نظيف دون أذيتها. ويعتبر هذا الانفصال النظيف في غاية الأهمية في الأوساط عديمة الجاذبية، حيث يمكن أن تتسبب عطالة الأشياء بتقلبها بشكل خارج عن السيطرة. وقد صمم الباحثون قابضات للأسطح المستوية والأسطوانات المنحنية مثل تلك الظاهرة في الأسفل للحصول على إمساك أقوى، وإفلات بثقة أكبر.
كما أن عدم وجود المقاومة الجوية يسمح باستخدام هذه القابضات مع الأشياء الضخمة مثل الأقمار الصناعية وسفن الفضاء. وعلى عكس ما هو موجود على الأرض، حيث تلزم قوة القبضة لرفع الأشياء، لا يتوجب في الفضاء سوى الإمساك بالأشياء والتحكم بها. ولهذا السبب تمكّن أحد القابضات من إمساك وسحب روبوت يبلغ وزنه 386 كيلوجراماً، في "القبة الآلية" (والتي توصف بأنها "طاولة هوكي هوائية ضخمة") المحاكية للجاذبية الصغرى في ناسا.
ويقول مؤلف الدراسة هاو جانغ من جامعة ستانفورد في رسالة بالبريد الإلكتروني إلى بوبيولار سيانس: "يمكن للقابض أن يوفر في الواقع نفس قدرة الإمساك (من حيث مقدار النيوتن) في الفضاء والأرض. وما يختلف هو الاستخدام. فعلى الأرض نحن نحاول رفع الأشياء، ولكن في الفضاء نحن نقوم بزيادة أو إبطاء سرعة الأشياء بلطف... إذ يمكن لأحد القابضات رفع صندوق خشبي [على الأرض]، ولكن يمكنه الإمساك والتحكم بسيارة في الأوساط العائمة".
وبمجرد أن يتم التعامل مع الحطام الفضائي ونقله بطريقة خاضعة للرقابة، فيمكن إما دفعه إلى الغلاف الجوي لحرقه بأمان، أو سحبه على متن سفينة فضاء لتحطيمه وإعادة تدويره. ويأمل الباحثون بأن تقوم هذه الروبوتات في الفضاء بجمع النفايات غير الكوكبية خلال السنوات الأربع إلى الخمس المقبلة.