يمكن للكاميرات الرقمية وكاميرات الهواتف الذكية اليوم التقاط صور بدقة أفضل من أي وقت مضى. ومع ذلك، فإن هذه الكاميرات، والتي تستخدم مستشعرات تسمى «أشباه الموصلات التكميلية ذات الأوكسيد المعدني» (أو «سي إم أو إس» اختصاراً)، لا يمكنها تحسس عمق الصور (أي تحديد مسافة العناصر في الصورة عن الكاميرا) بكفاءة «الليدار»، وهو جهاز يُستخدم للكشف الضوئي وتحديد أبعاد الأجسام.
كيف تستشعر الكاميرات العمق؟
تُصدر حساسات الليدار نبضات من ضوء الليزر في البيئة المحيطة. وعندما ترتد هذه الموجات الضوئية عن الأجسام وتعود إلى الحساس، فإنها توفر معلومات حول بُعد هذه الأجسام عن مصدر الضوء. يفيد هذا النوع من التصوير ثلاثي الأبعاد في توجيه الآلات مثل الطائرات بدون طيار أو الروبوتات أو المركبات ذاتية القيادة. لكن أجهزة الليدار كبيرة وثقيلة ومكلفة، ناهيك عن أنها بحاجة إلى أن يتم بناؤها من نقطة الصفر وتخصيصها في كل نوع من أنواع التطبيقات المختلفة.
أراد باحثون من جامعة ستانفورد تصميم جهاز استشعار ثلاثي الأبعاد منخفض التكلفة يُسخّر أفضل ميزات كلتا التقنيتين (الكاميرات الرقمية والليدار). ما قام به الباحثون بشكل أساسي هو تعديل أحد مكوّنات حساس الليدار ليصبح متوافقاً مع الكاميرات الرقمية النموذجية، وليمنحها القدرة على تقدير المسافات في الصور. نُشرت ورقة بحثية يصف فيها الباحثون هذه التكنولوجيا الجديدة في مجلة «نيتشر كوميونيكيشن» في مارس/آذار 2022.
مستشعرات «سي أو إم إس»
أصبحت مستشعرات «سي أو إم إس» متقدمة وعالية الدقة ورخيصة الثمن للغاية على مدى العقود القليلة الماضية. يقول «أمين أربابيان»، الأستاذ المشارك في قسم الهندسة الكهربائية في جامعة ستانفورد، وأحد مؤلفي الورقة البحثية الجديدة: «المشكلة هي أن هذه المستشعرات لا يمكنها تحديد ما إذا كان جسم ما على بعد متر واحد أو 20 متراً. والطريقة الوحيدة التي يمكن بها جعل المستشعرات تتحس المسافات هي من خلال الإشارات غير المباشرة، مثل الظلال، والتي تكشف للمستشعرات أحجام الأجسام»، ويضيف: «حتى الآن، لا يتم إنتاج أنظمة الليدار المتقدّمة التي تُستخدم في السيارات ذاتية القيادة على نطاق واسع».
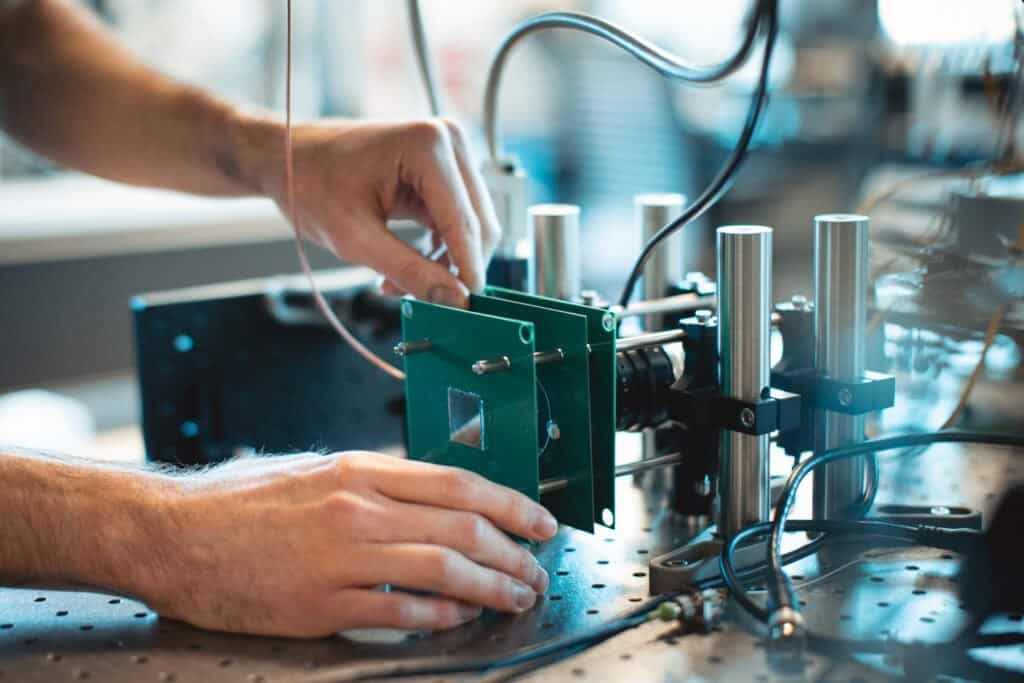
إذا كانت هناك طريقة لتزويد مستشعرات «سي إم أو إس» بقدرات استشعار ثلاثية الأبعاد بتكلفة منخفضة من خلال ملحقات أو إضافات بسيطة، فيمكن تطبيق هذه التقنية على نطاق واسع في المجالات التي يتم فيها استخدام هذه المستشعرات. يأتي التعديل الذي صممه باحثو جامعة ستانفورد على شكل أداة بسيطة يمكن وضعها أمام كاميرا رقمية عادية أو حتى كاميرا الهاتف الذكي. يقول «أوكان أتالار»، باحث مرشح لنيل شهادة الدكتوراه في الهندسة الكهربائية في جامعة ستانفورد، والمؤلف الرئيسي للورقة البحثية الجديدة: «عادة، يتم التقاط الصور ثلاثية الأبعاد من خلال إضافة مصدر للضوء، وهو موجود في معظم الكاميرات على شكل الضوء الوامض (أو «الفلاش»)، كما أنه موجود في المُعدِّلات الجديدة التي اخترعناها»، ويضيف: «باستخدام هذه التكنولوجيا الجديدة، ستستطيع الكاميرات إدراك السطوع والألوان والعمق أيضاً».
ما هي الآفاق المستقبلية لتحسس الكاميرات الرقمية للعمق؟
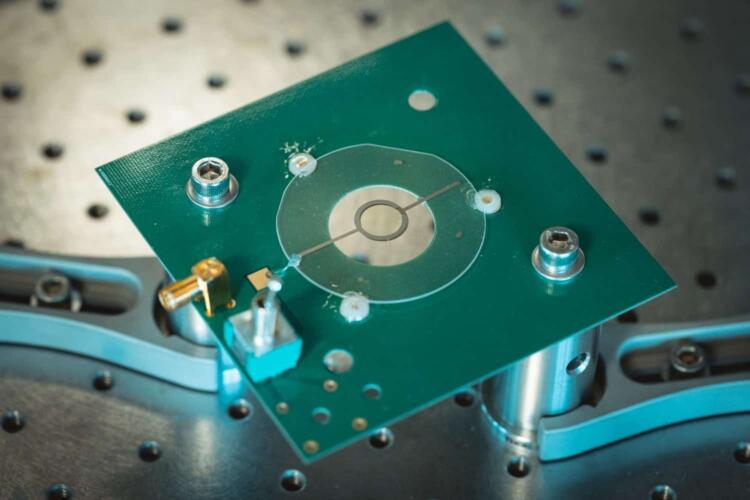
يمكن للمُعدِّلات أن تغير سعة وتردد وشدّة الأمواج الضوئية التي تمر عبرها. يتكون الجهاز الذي صممه فريق جامعة ستانفورد من مُعدِّل مصنوع من رقاقة من مركّب «نيوبات الليثيوم» مغلفة بأقطاب كهربائية محصورة بين مستقطبين بصريين. يقيس هذا الجهاز المسافات من خلال تحسس الاختلافات في خصائص الضوء الوارد.
أثناء الاختبارات التي أجراها الباحثون، التقطت كاميرا رقمية مقترنة بالنموذج الأولي الخاص بفريق جامعة ستانفورد ما يُدعى بـ «خرائط العمق» بدقة 4 ميغابكسل، وبطريقة موفرة للطاقة (خرائط العمق هي صور تحتوي على معلومات حول بعد الأجسام الموجودة في الصور). بعد إثبات أن الفكرة قابلة للتطبيق العملي، سيحاول الفريق الآن تحسين أداء الجهاز. حالياً، يعمل المُعدِّل الخاص بالفريق بالاقتران مع مستشعرات يمكنها تحسس الضوء المرئي، ومع ذلك، يشير أتالار إلى أنه وزملاءه قد يأخذون بعين الاعتبار تصميم إصدار يمكن أن يعمل مع كاميرات الأشعة تحت الحمراء أيضاً.
اقرأ أيضاً: ترى وتفهم ما ترصده: تطوير كاميرات لديها أنظمة إدراكية
يعتقد أتالار أن هذا الجهاز يمكن أن يكون مفيداً في مجال الواقع الافتراضي والواقع المعزز، كما يمكن أن يعزز قدرات الاستشعار الخاصة بالأجهزة ذاتية التحكم مثل الروبوتات والطائرات بدون طيار والمركبات الجوالة. على سبيل المثال، يحتاج الروبوت الذي يعمل في مستودع لأن يكون قادراً على إدراك بُعد الأشياء والعقبات المحتملة ليتحرّك بأمان.
يقول أتالار: «تعتمد هذه [الأجهزة ذاتية التحكم] على الخوارزميات لاتخاذ القرارات، ويعتمد أداؤها على المعلومات الأساسية التي تأتي من المستشعرات»، ويضيف: «نريد تصميم أجهزة استشعار منخفضة التكلفة، ولكننا نريد أن تكون هذه الأجهزة دقيقة للغاية في استشعار البيئة المحيطة».