قام فريق فرنسي متخصص بالروبوتات النانوية من معهد فيمتو إس تي، في مدينة بيزانسون في فرنسا، بتجميع نظام روبوتي جديد فائق الصغر يفتح آفاقاً جديدة في مجال التقنيات النانوية البصرية. يقوم المصنع النانوي ميوروبوتيكس، بالجمع ما بين عدة تقنيات موجودة، بإنشاء بنى ميكروية داخل غرفة كبيرة مخلّاة، ويقوم بتثبيت المكونات على أطراف الألياف البصرية بدقة تصل إلى النانو متر. قام الفريق بنشر مقالة عن منزل ميكروي في مجلة Journal of Vacuum Science and Technology A، من دار أيب للنشر، ويبين هذا المنزل كيف تمكن الباحثون من تطوير تقنيات التحسس البصري عن طريق التلاعب بالمدافع الأيونية، والحزم الإشعاعية الإلكترونية، والتحكم بتوجيه الروبوتات.
حتى الآن، لم تتواجد محركات ميكانيكية روبوتية يمكن استخدامها للتجميع النانوي في تقنيات الحساسات التي تعتمد على الألياف البصرية، وبالتالي فإن العمل على هذا المقياس كان يمنع المهندسين من تشكيل بنى ميكروية. يسمح هذا الابتكار بتركيب عناصر الحساسات فائقة الصغر على أطراف الألياف البصرية بحيث يتمكن المهندسون من رؤية المكونات المختلفة والتلاعب بها. ومع هذا الاكتشاف، يمكن إدخال ألياف بصرية بثخانة الشعرة البشرية إلى مواضع كان الدخول فيها من قبل مستحيلاً، مثل المحركات النفاثة والأوعية الدموية، وذلك لكشف مستويات الإشعاع أو الجزيئات الفيروسية.
يقول جان إيف روش، أحد مؤلفي البحث: "للمرة الأولى، تمكنا أخيراً من تحقيق إمكانية بناء الأنماط وتجميع المكونات بدقة أقل من 2 نانو متر، وهو أمر هام للغاية بالنسبة لأوساط الروبوتات والبصريات".
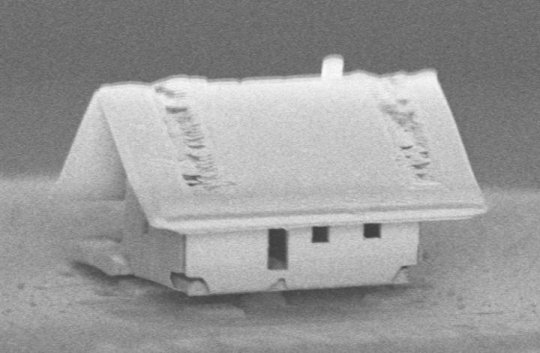
جمع المهندسون الفرنسيون ما بين جميع المكونات التقنية للتجميع النانوي: شعاع أيوني مركز، نظام حقن الغاز، وروبوت صغير يمكن التحكم به، وذلك ضمن غرفة مخلاة، ومن ثم قاموا بتركيب مجهر لمراقبة عملية التجميع. يقول روش: "قررنا بناء منزل ميكروي على الليف البصري حتى نثبت أننا قادرون على تحقيق عمليات التجميع للأنظمة الميكروية على أطراف الألياف البصرية بدقة عالية".
يشبه بناء المنزل الميكروي صنع حجر نرد عملاق من قطعة ورقية، غير أن التجميع النانوي يتطلب أدوات أكثر تعقيداً. يستخدم الشعاع الأيوني المركز كالمقص لقطع أو خدش الغشاء الرقيق المصنوع من السيليكا، والذي يعتبر بمثابة (الورقة) التي سيصنع منها المنزل. وما أن يتم طي الجدران إلى مواضعها، يتم اختيار تشغيل المدفع الأيوني بوضعية منخفضة الاستطاعة، ويقوم نظام حقن الغاز بإلصاق حواف البيت في أماكنها الصحيحة. ومن ثم يستخدم المدفع الأيوني منخفض الاستطاعة ونظام حقن الغاز لحفر شكل البلاط بدقة على السطح، وهو تفصيل يثبت دقة ومرونة النظام.
في هذه العملية، يتم تركيز المدفع الأيوني على منطقة مربعة طول ضلعها 300 ميكرو متر فقط، وذلك لإطلاق الأيونات على طرف الليف البصري والغشاء الرقيق المصنوع من السيليكا. يقول روش: "من الصعب للغاية توجيه الروبوت بدقة عالية عند هذا التقاطع بين الحزمتين الشعاعيتين". ويشرح كيف عمل اثنان من المهندسين على عدة حواسيب للتحكم بالعملية. تمت أتمتة العديد من الخطوات، ولكن يأمل الفريق أن يتمكن من أتمتة كافة مراحل التجميع الروبوتية في المستقبل القريب.
حالياً، يعمل هؤلاء المهندسون، وباستخدام نظام ميوروبوتيكس، على تشكيل بنى ميكروية مخصصة لكشف جزيئات محددة، وذلك بتثبيت هذه البنى على الألياف البصرية. ويأمل الفريق المختص بالروبوتات النانوية بتحقيق المزيد من التقدم في هذه التقنية، وذلك بتشكيل بنى أصغر حجماً وتركيبها على أطراف الأنابيب النانوية الكربونية، والتي لا يتجاوز قطرها 20 إلى 100 نانو متر.
المصدر: موقع ساينس ديلي.